Hinweis: es gab zwischenzeitlich ein Update mit Dreh-Kugellager und verbessertem Antrieb. Bei der Website-Überarbeitung habe ich beide Teile in diesem Artikel zusammengefasst. Die Beschreibung der Verbesserungen beginnt hier.
Bekohlungskran als Funktionsmodell

Modell
Der Kran der Märklin Bekohlungsanlage 5618 soll zu einem Funktionsmodell umgebaut werden.

Das Kranhaus ist groß genug, um die Antriebe für Schwenken und Heben/Senken aufnehmen zu können.
Funktionsmodell Bekohlungskran
Die Funktionen sind überschaubar:
- Drehen n x 360 Grad
- Heben / Senken Kranhaken
- Licht am Ausleger
Ausleger - Heben / Senken entfällt, Fahrfunktionen gibt es auch nicht.
Für mich waren die Punkte 1 und 2 wichtig und ausreichend - das Licht am Ausleger sollte immer an sein, um die Stromzufuhr über die Drehdurchführung als funktionierend anzuzeigen.
Ausserdem sollten sich die Kosten wieder in Grenzen halten und möglichst viele Standardteile aus dem Baumarkt und der Elektrotechnik verwendet werden. Als gesondert zu beschaffende Teile blieben die Zahnräder und die Isolierbuchsen zur Stromdurchführung übrig. Für die Buchsen gibt es auch eine 3D-Druck Variante. Größte Vereinfachung und auch Kosten reduzierend war die Wahl der Digitalmotoren von Uhlenbrock.
Konstruktive Lösung
Hauptproblem war wie schon beim Fuchs.Bagger die stromführende Versorgung der Einbauten im Oberteil des Krans, wobei ein uneingeschränktes Drehen um 360 Grad möglich sein sollte. Die Lösung dort war folgende:
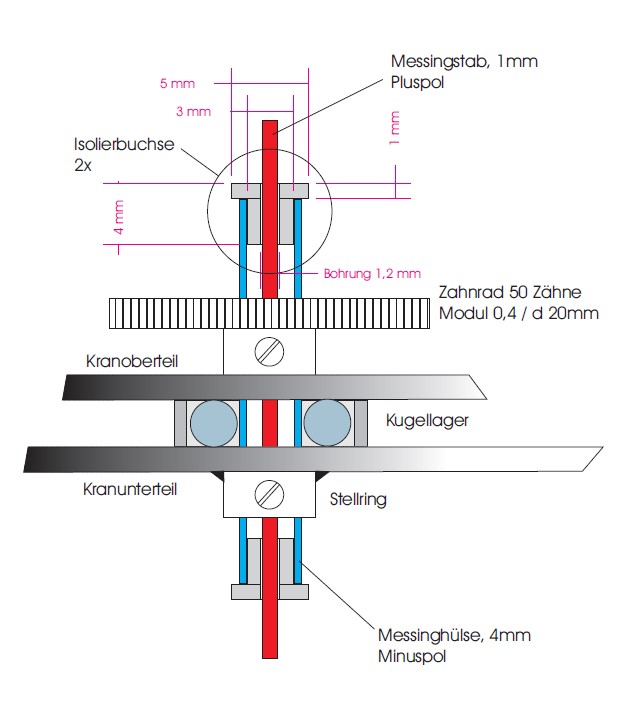
Das Drucklager habe ich weggelassen und dafür eine Setzmutter in die neue Bodenplatte eingeklebt, durch die die 4mm Messinghülse passt. Ansonsten wird auch hier das Oberteil wird durch eine Schnecke am feststehenden Zahnrad gegenüber der Bodenplatte weggedreht.
Die erste Idee war, den konstruktiv recht ordentlich ausgeführten originalen Drehteller aus dem Bausatz zu verweden. Aber bei seitlich wirkenden Kräften klemmt es beim Material Kunststoff doch. Also habe ich diesen Teil wieder ausgebaut und zwei neue Trägerteile für die Achsdurchführung mit dem 3D-Drucker erstellt (alle Zeichnungen und Original-Files findet ihr wie immer im Download):
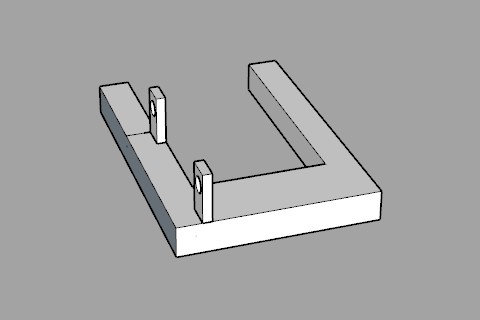
Lagerplatte oben
Lagerplatte unten
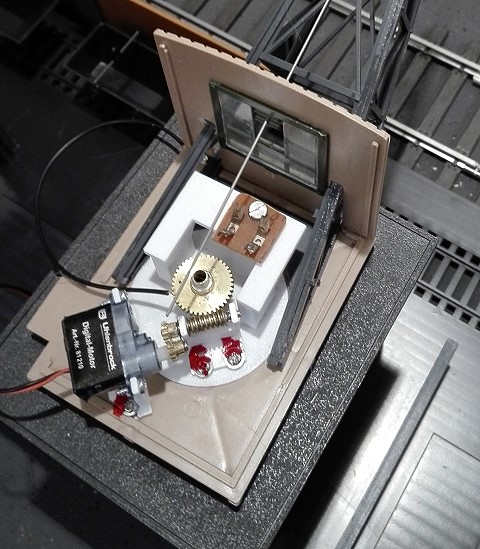
Eingebaut sieht das dann so aus:
Lagerplatte oben eingeklebt
Auf dem Bild ist auch schon das Schwengetriebe festgeklebt (alle Klebungen mit Sekundenkleber), prinzipieller Aufbau wie beim Fuchs-Bagger, Ausführung aber als 3D-Druck.
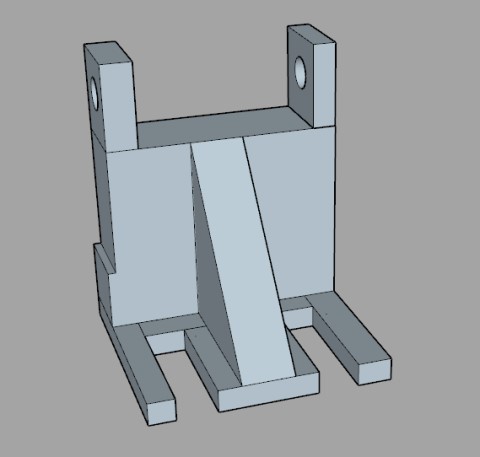
Lagerbock Schneckengetriebe
Auf dem Digitalmotor kann man einfach ein Zahnrad befestigen, aber nicht die ca 1cm lange Schnecke. Zur Umsetzung musste wieder ein einfaches Schneckengetrieb gebaut werden. Alle Zahnräder sind Modul 0,4 und bestehen aus Messing.
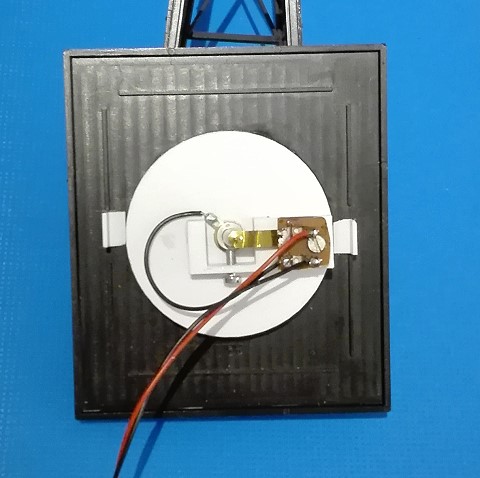
Lagerplatte unten eingeklebt
Auf dem Bild der unteren Lagerplatte ist bereits der Kontakthalter verklebt. Die Schraube des Stellrings ragt durch die Aussparrung und fixiert die 4mm Hohlachse. Da das Zahnrad mit der Messinghülse verlötet ist, kann das Oberteil gegen das Unterteil gedreht werden.
Kontakthalter unten
Für das Oberteil des Krans ist natürlich auch ein Kontakthalter erforderlich, der wie folgt aussieht:
Kontakthalter oben
An beiden Kontakthaltern sind 2 Pole einer Lötleiste angeschraubt, ein Pol mit Kontakt zur Messinghülse und ein Pol über Kontaktfeder mit Verbindung zur isolierten Mittelachse.
Kontaktabnahme von der Messinghülse erfolgt wieder mit einer Lötöse für 4mm Bananenbuchsen:

Hier die Einbaulage des oberen Kontakthalters. Der Ausleger wurde im Innern des Krangehäuses von den Querstreben befreit, damit genug Freiraum für die Einbauten ist:
Hinweis zu den Darstellungen der 3D-Druck-Komponenten:
3D-Drucker arbeiten schichtweise von unten nach oben. Daher müssen einige Komponenten über Kopf konstruiert werden, um leere Räume unter der Druckdüse zu vermeiden. Der von mir benutzte Drucker "flasforge" kann auch umgekehrt verfahren, fügt dann aber Stützelemente hinzu, die man nachher entfernen bzw abbrechen muß. Das erfordert Nacharbeit und läßt sich vermeiden, wenn man beim Entwurf die Reihenfolge des Schichtaufbaus berücksichtigt.
Die beiden Digitalmotoren werden ebenfalls mittels 3D-Druck-Elementen befestigt. Die Halter sind mit Sekundenkleber lagerichtig befestigt.
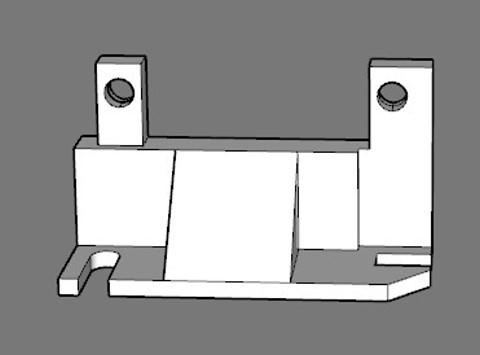
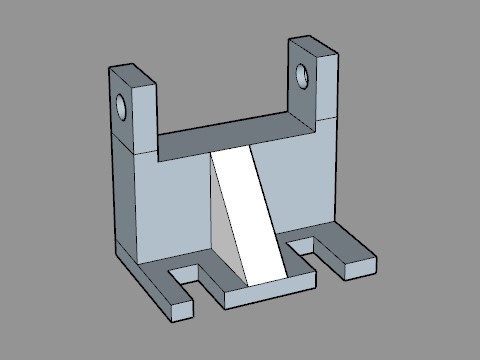
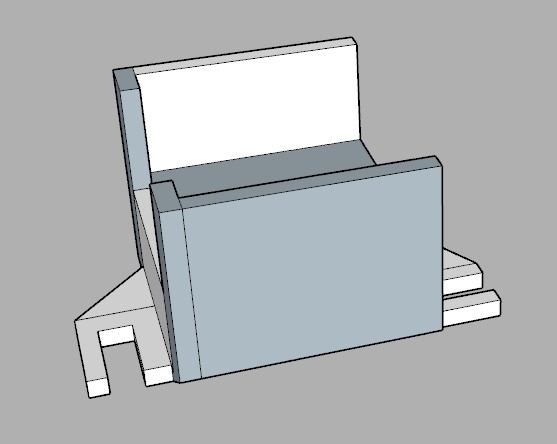
Lagerbock Schwenkmotor
Lagerbock Hubmotor
Um den Lagerbock für den Hubmotor drucken zu können mussten Stützelemente hinzugefügt werden. Das erledigt eine Routine des Druckers. In der Darstellung fehlen diese Stützen, da sie nicht konstruiert werden müssen.
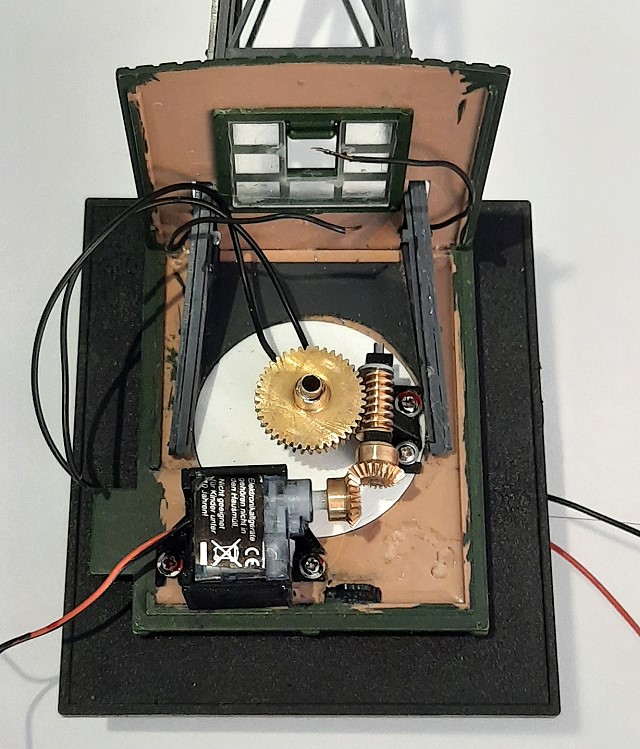
Die Detailaufnahmen der Antriebe zeigen auch die Einbaulage:
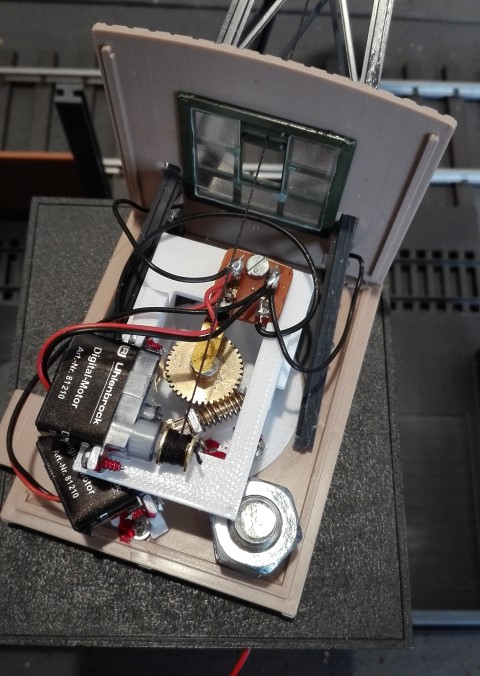
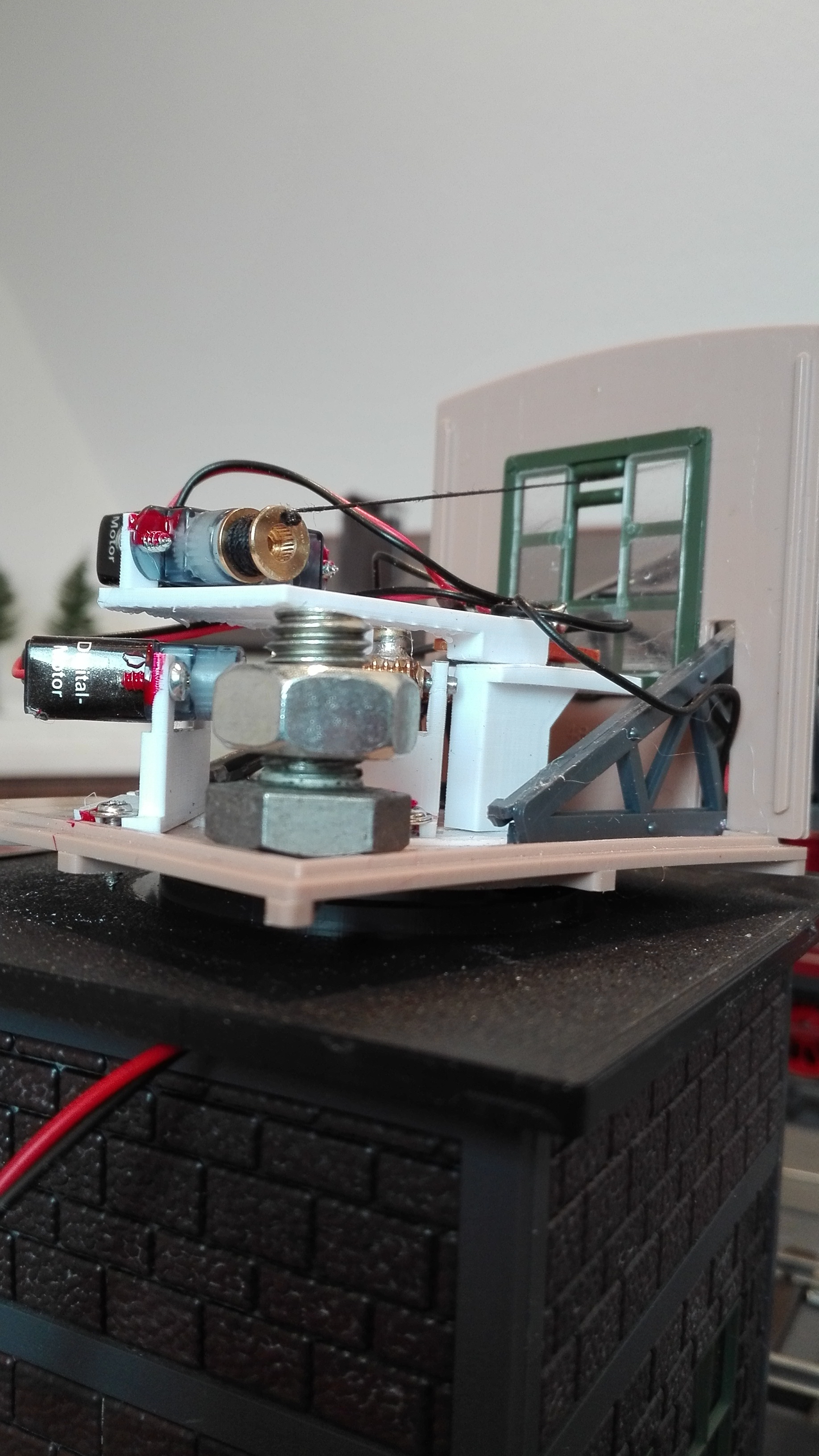
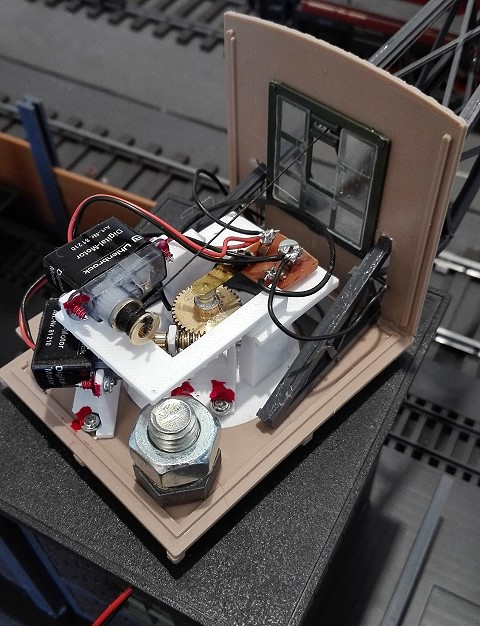
Zwei eingeklebte Schrauben M10 bilden das Gegengewicht zur Kohlenlore.
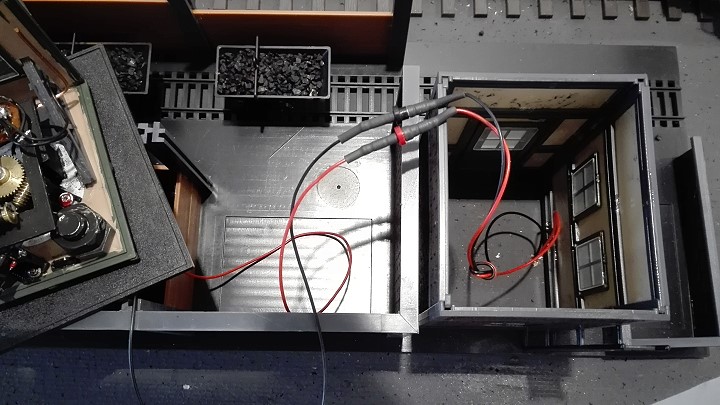
Der Kranteil ist für Wartungs- und Einstellarbeiten abnehmbar und durch Steckverbinder von der Versorgung trennbar:
Inbetriebnahme und Modifikationen
Es gab im Rahmen der Inbetriebnahme 3 Probleme:
- unterbrechungsfreie Stromzufuhr in das Kranoberteil
- Instabilität im Schneckenantrieb
- Gewicht der Kohlenlore
Zu 1. Stromzufuhr
Versuche ergaben, dass die Stromleitung über die mittige Achse kontaktsicher war. Hierfür sorgte der Federdruck oben und unten.
Nicht Kontaktsicher war die Stromzuführung bzw -Abnahme von der Drehachse. Das fiel beim Baggerumbau nicht auf, da dort Ober- und Unterteil aus Metall bestehen. Es wurde in folgen Punkten modifiziert: Im Unterteil wurde die Versorgung mit einer Mutter direkt am Stellring angeklemmt, da hier keine Drehung erfolgt:
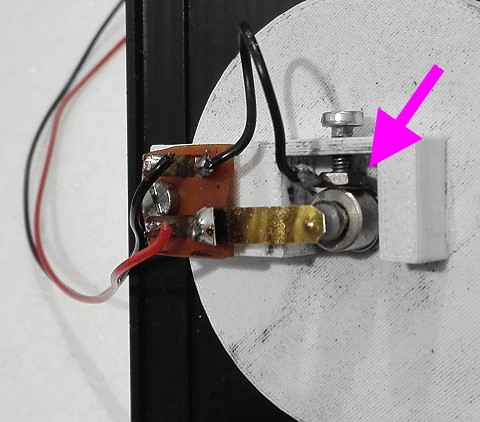
- Zusätzlich wurde zwischen Stellring und Kranunterteil eine Feder eingklemmt,um permanent Zug auf die Kontaktringe im Oberteil auszuüben. Zwei Windungen einer im Durchmesser geeigneten Feder reichten; sie sollte nicht zu steif sein.
- Im Oberteil wurde eine weitere Öse zu Stromabnahme eingefügt - doppelt leitet sicherer.
- Im Rahmen der Modifikationen wurde dann noch ein steckbare Kontaktstelle für die Motoren eingebaut, um separat Programmieren zu können und für spätere Fehlersuchen:

Zu 2. Instabilität Schneckenantrieb
Die Steifigkeit der 3D-Druckteile in sich und bezogen auf die Befestigungslöcher erwies sich als zu gering bei Belastungen des Oberteils durch beschwerte Kohlenloren. Beide Teile wurden konstruktiv überarbeit:
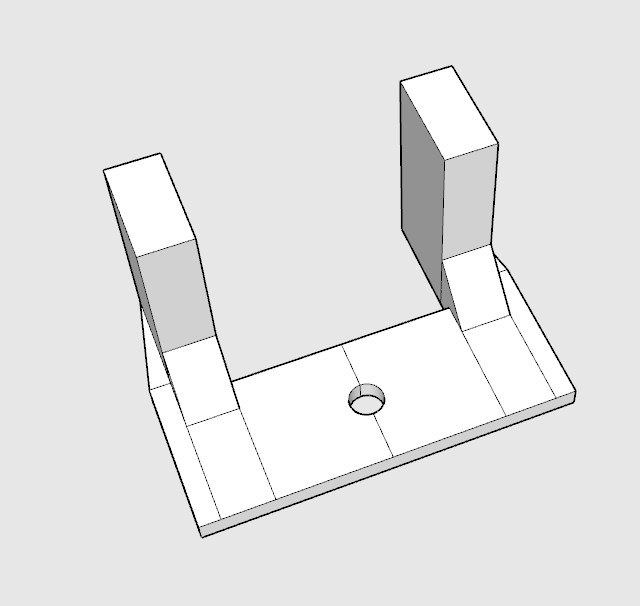
Lagerbock Schnecke mit Versteifung
Lagerbock Schwenkmotor mit Versteifung
Zu 3. Gewicht der Kohlenlore
Um Pendeln der Hublast beim Bewegen zu verhindern - wie man es oft bei solchen Modellen sieht - hatte ich die Kohlenlore möglichst schwer gemacht: Einkleben von zwei M5-Schrauben in das Unterteil. Darüber dann Kohlenschotter aus dem Baukasten, fixiert wie beim Einschottern.
Das war zu viel! Und zwar nicht für den Hubmotor, aber für das Schwenken. Effekt war ein ruckartig drehendes Kranoberteil, was ohne Hublast nicht zu beobachten war. Also alles wieder raus aus der Lore, als Füllmaterial ein Stück Styropor eingeklebt und darauf eine Schicht Kohlen. Damit war das Problem behoben.
Noch eine Erfahrung und eine Empfehlung:
- Nur ganz leicht ölen, z.B. mit einem Tropfen Kontaktspray
- Auf keinen Fall versuchen, die Kontaktfähigkeit mit Grafitpulver zu verbessern. In Verbindung mit Öl ergibt das eine hemmende Schmiere!
- Statt Zahnräder mit Modul 0,4 besser welche mit 0,5 verwenden:
- sie sind nur geringfügig größer
- Getriebe lassen mehr Spiel zu und sich besser justieren
Im Download-Bereich findet Ihr alle Dateien für den Nachbau mit den original CAD-Files, damit Ihr ggfs Anpassungen und Änderungen vornehmen könnt.
Update Bekohlungskran als Funktionsmodell
Testlauf Getriebe und Abschluss des Updates:
Anlass zum Update
Der Unterlagensatz zum Funktionsmodell "Bekohlungskran" wurde mittlerweile fast 400 mal heruntergeladen. Es gab aber aus dem Betrieb heraus mehrere Gründe, die Konstruktion und den Aufbau noch mal zu überarbeiten:
- Das Kranoberteil kippte durch Spiel im Lager leicht nach vorn - trotz Gegengewicht
- Die Drehbewegung links / rechts war nicht gleichförmig
- Der Schneckenantrieb war schwierig zu justieren
- Ebenso der Stirnradantrieb am Schwenkmotor
- Die Digitalmotoren sollten steckbare Anschlüsse zum Programmieren erhalten
Die Aufbauprinzipien aus dem Ursprungsbeitrag wurden beibehalten und hatten sich bewährt, besonder das freizügige Drehen n x 360 Grad des Kranoberteils. Schwerpunkt war die Überarbeitung des Drehlagers.
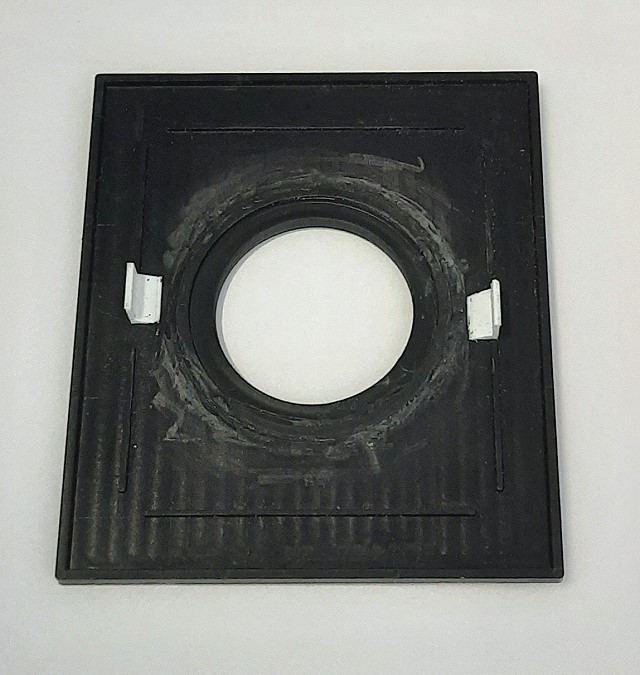
Zunächst mal wurde der Kran komplett "entkernt":

Ebenso wurde das untere Drehlager entfent:
Konstruktive Änderung des Drehlagers
Das Kippen des Kranoberteils sollte durch die Lagerung der Achshülse in einer Einziehmutter weitestgehend verhindert werden - was sich als nicht befriedigend herausstellte!
Die beste Lösung gegen Kippen ist ein im Durchmesser möglichst großes Drucklager.
Eingesetzt wird jetzt ein Axial Kugellager 51105 Flachsitz Chrom, 25x42x11mm
(Amazon, ca 11,- Euro)
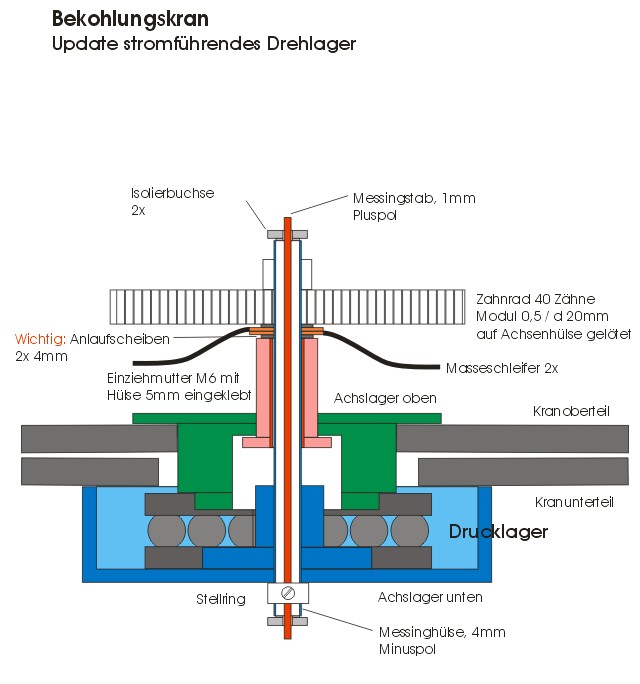
Die Setzmutter im Drehlagerteil oben ist beibehalten worden, wieder mit Messinghülse (5mm) eingeklebt. Ansonsten wird auch hier das Oberteil wird durch eine Schnecke am feststehenden Zahnrad gegenüber der Bodenplatte weggedreht.
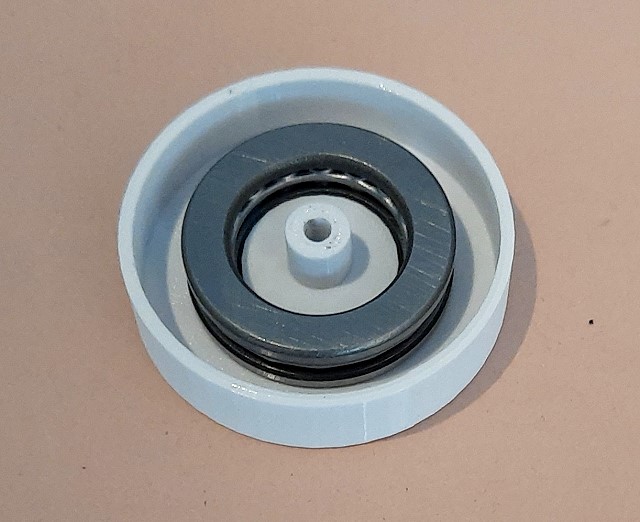
Das Drucklager besteht aus drei Teilen:

Zusammengesetzt ist es 11mm hoch:

Zur Montage dieses Kugellager mussten Drehlager oben und unten geändert werden.
Alle Files für den 3D-Druck findet ihr im Download.
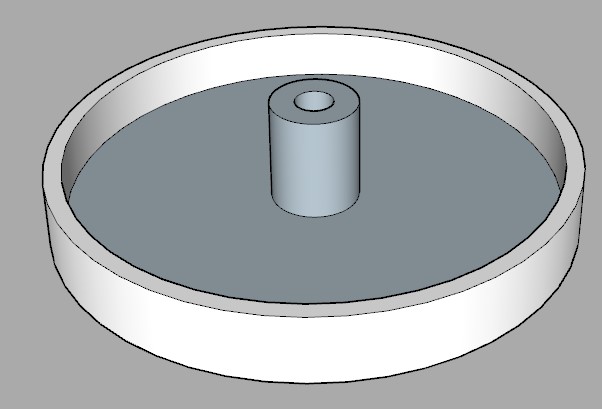
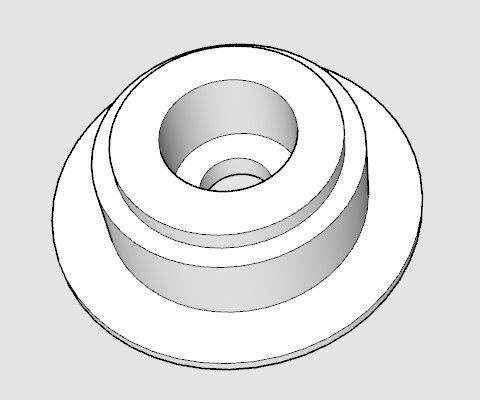
Drehlager oben (Darstellung aus drucktechnischen Gründen über Kopf):
Drehlager unten:
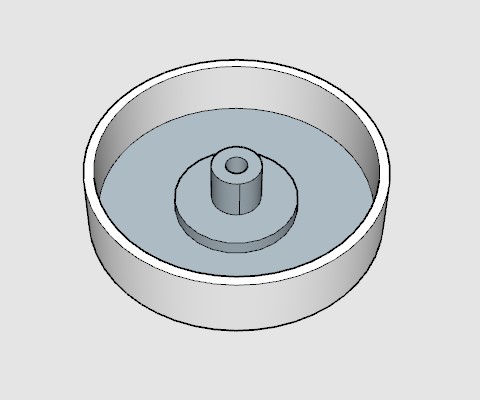
Das Kugellager wird lediglich in das untere Drehlager eingelegt - nicht verkleben, damit es sich selbstätig zentrieren kann!
Eingebaut sieht das dann so aus:

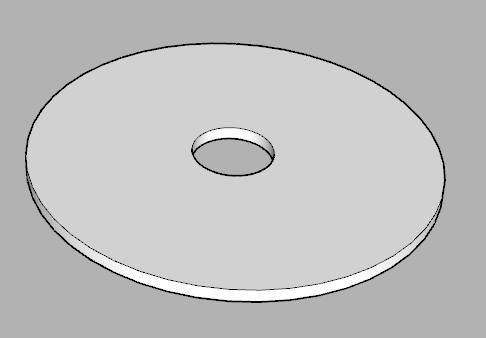
Oben wird die neue Lagerplatte eingeklebt, wieder mit Einziehmutte als Hohlachsenführung. Wichtig zur sicheren Stromübertragung beim Drehen: zwei 4mm Hülsen mit einer Unterlegscheibe oben und unten. Diese sogenannten Anlaufscheiben vermindern die Reibung und sorgen dafür, dass die Kontakte nicht am Zahnrad oder am Lager festhaken:
Die Befestigung der Hohlachse mit Schraube als Gegenmoment entspricht dem ersten Kranaufbau. Der Kontakthalter unten ist eines der wenigen Teile, die unverändert übernommen werden konnten:
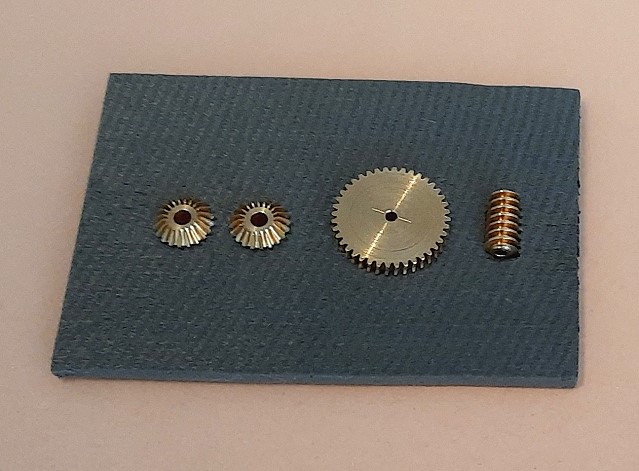
Neues Getriebe
Das ursprüngliche Getriebe mit Zahnrädern Modul 0,4 war schwer zu justieren und lief auf Dauer nicht gleichmässig. Zwischen Modul 0,4 (zu klein) und Modul 0,8 (zu groß) gibt es marktgängig nur Modul 0,5. Also wurde Modul 0,5 gewählt. Der Drehantrieb erfolgt wieder über ein Schneckengetriebe, Kopplung des Digitalmotors jetzt über Kegelradgetriebe, dass sich leichter justieren lässt und sicheren Zahneingriff gewährleistet. Den Zahradsatz lieferte modellbau-profi.de . Die Kegelräder wurden mit Sekundenkleber fixiert. Zufälligerweise passte das Kegelrag genau über die Befestigungsschraube im Drehzapfen des Digitalmotors. Das ergab hinreichenden Runflauf. Die Schnecke sitzt klemmend auf einer 2mm Stahlachse - nicht kleben!
Die Komponenten zur Motor- und Getriebemontage wurden aus den ursprünglichen 3D-Druck - Komponenten modifiziert; neue Files im Download.
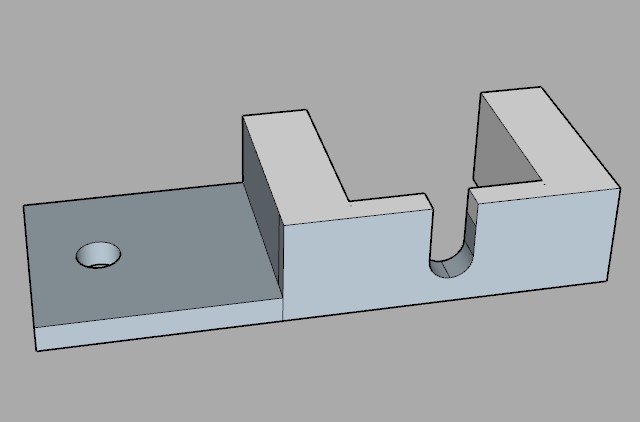
Lagerbock Schnecke:
Lagerbock Schwenkmotor:
Da beim Schwenkmotor die Schrauben in den Befestigungslaschen nicht mehr fasten, wurden diese abgetrennt. Der Digitalmotor sitzt jetzt klemmend passend im Lagerbock.
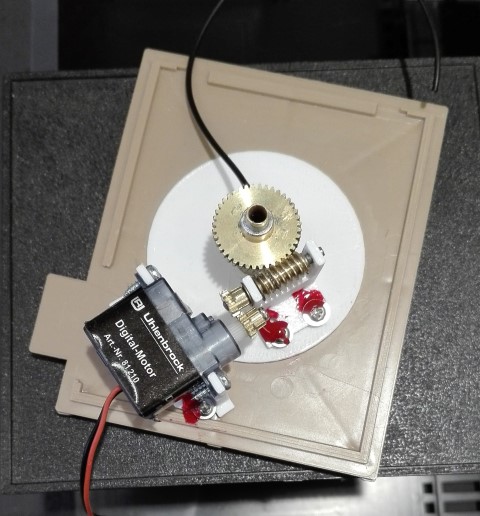
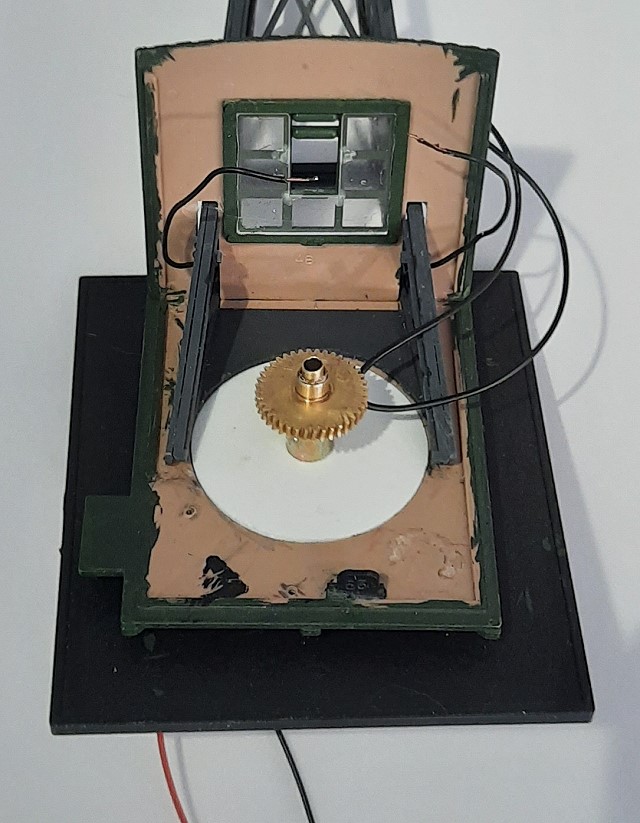
Das Schwenkgetriebe montiert:
. . . und elektrisch angeschlossen:
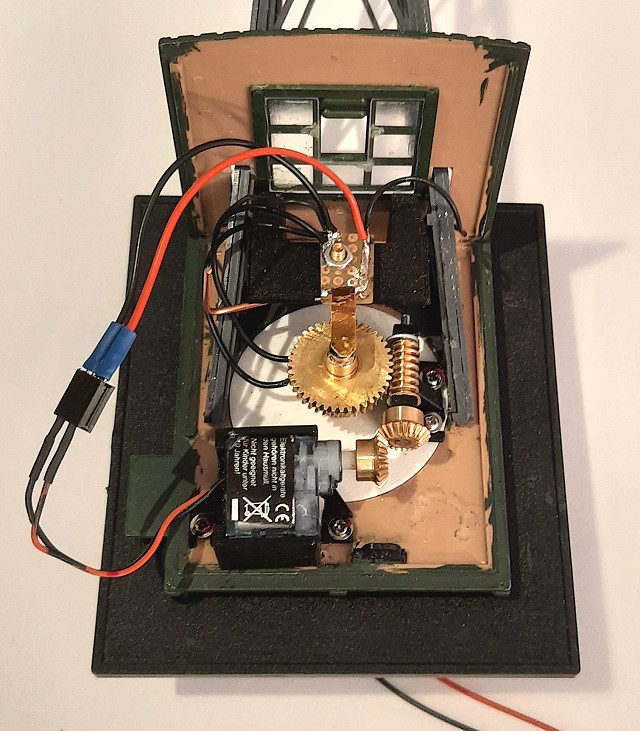
Hier sieht man auch die beiden Anlaufscheiben an der Schnecke: sie sorgen für möglichst geringes Spiel beim Vor- und Rücklauf der Schnecke und reduzieren die Reibung gegen den Lagerbock. Das sorgt für gleichmässigere Links- / Rechtsdrehung des Kranoberteils.
Neu ist auch die Stecklösung für den Anschluss der Digitalmotoren:
- handelsübliche Buchsenleiste 2,54mm (davon 4 Kontakte)
- Stifte sind Drahtenden von Widerständen
- alles mit Schrumpfschlauch isoliert
Montage Hubmotor wie gehabt
An der Montageart des Hubmotors hat sich prinzipiell nichts geändert, es musste aber zur Anpassung an die Aufbauhöhe des neuen Schwenkgetriebes eine abgewandelte Befestigung eingesetzt werden:
Modifizierung komplett
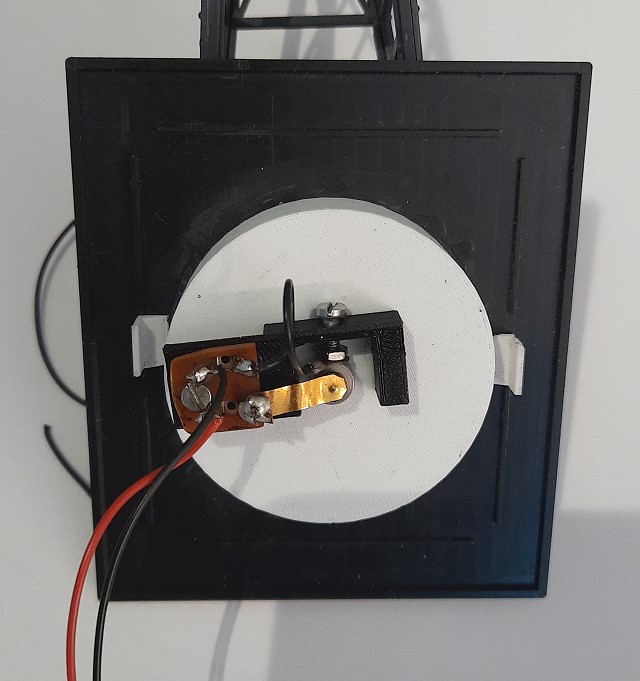
Auf dem Bild sind jetzt alle Änderungen eingebaut. Die Verklebungen wurden wieder mit Sekundenkleber durchgeführt. Ein Ausgleichgewicht ist nicht mehr erforderlich. Das Spiel des Drucklagers wird möglicht eng, aber noch leichtgängig, eingestellt. Dazu wird der Stellring am unteren Drehlager mit entsprechendem Druck gegen die Bodenplatte fixiert.
Das neue Innenleben:
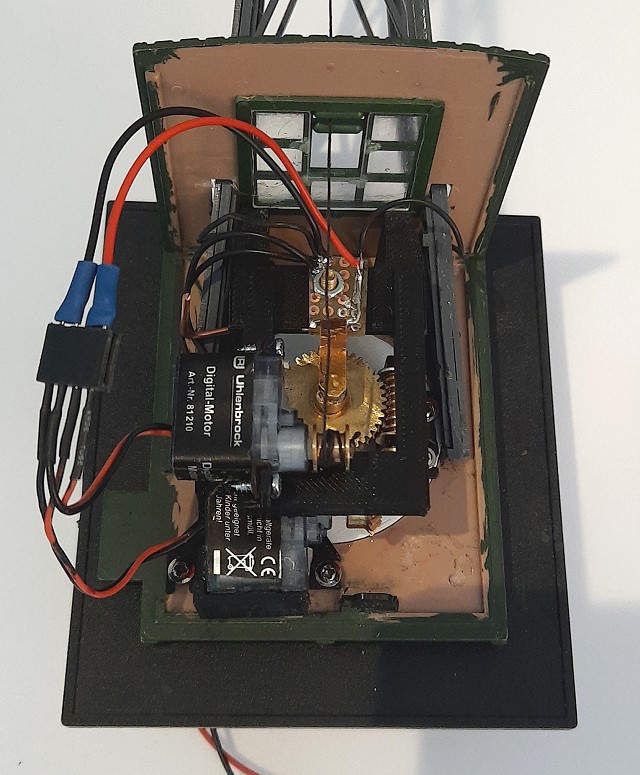
Die Lampe am Ausleger ist wieder direkt an die Versorgung angeschlossen und zeigt somit an, dass das Kranoberteil mit Strom versorgt ist.
Ergänzende Hinweise
Bei der Inbetriebnahme gab es keine Probleme!
Ein Metallgetriebe benötigt natürlich eine Schmierung. Ich verwende hierfür einen Tropfen (und auf keinen Fall mehr!) Mosöl, auch als Karamba bekannt. Es ist durch die Eigenschaft als Kriechöl sehr dünnflüssig, ölt aber dennoch gut und verbessert die Kontaktgabe.
Die CV-Werte des Hubmotors habe ich noch mal geändert und den Nachlauf auf Null gesetzt. Jetzt stoppt der Kranhaken auch da, wo er soll. CV-Werte Schwenkmotor sind unverändert.
Es hatte übrigens der Digitalmotor für das Schwenken den CV-Wert für f1 (CV36 = 1) verloren: der Wert stand auf 36 - wie auch immer das passiert ist. Jedenfalls hat sich hier gleich die Stecklösung für den Anschluss der Motoren bewährt.
Im Download-Bereich findet Ihr alle Dateien für das Update mit den original CAD-Files, damit Ihr ggfs Anpassungen und Änderungen vornehmen könnt. Ebenso sind alle bildlichen Darstellungen sowie die CV-Tabellen der Digitalmotoren im Download enthalten
Weitere Funktionsmodelle findet ihr auch in meiner Video-Gallery .